Haptics has to do with the sense of touch. My research uses haptics to convey the shape of non-existing (so-called virtual) objects. How does that work? Think about how 3D computer graphics (in a computer game or in a Virtual Reality application) creates non-existing yet reasonably realistic fake-imagery of what your eyes should receive on your monitor. Take, for example, this 3D graphic of an apple:
Intro - what is Haptics?

To perceive the shape of the apple in addition to its image, we need a device to create the appropriate forces to trick our hands into thinking that we touch an apple. Why forces? Think of it this way: if we poke an apple we perceive it as solid to the touch because it counters all the force we put into it - at least until we overdo it and the apple turns into apple sauce. If you were to poke a foam apple, the counter-force would be less than from a real (fairly hard) apple and you would interpret this weaker force-feedback as "soft".
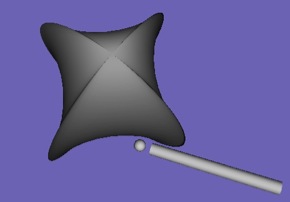
The device shown on the right is a Phantom force feedback device. It's used by holding the pen and touching virtual objects with its tip. If you interact with a haptic virtual apple, the phantom generates the appropriate force-feedback needed to convince you that the tip of the pen actually encounters the surface of an apple. You can feel its shape and run your finger around it. A separate computer (not shown) calculates the correct amount and direction of the force and uses the phantom's internal motors to apply this force to the tip of the pen (via the arm).

How does this generation of a counter-force work?
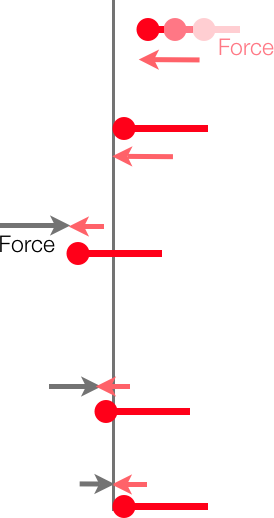
Let's assume your hand moves the pen's tip towards the apple's surface with a certain force. In the diagram here, the pen is shown by the red tadpole symbol approaching from the right. The computer constantly receives the tip's position from the phantom and calculates if the tip is in contact with the surface (the gray horizontal line in the diagram). We assume that anything to the left of the grey line is inside the apple. If there is no intersection - nothing happens, the tip is unopposed to proceed towards the surface.
Let's assume your hand moves the pen's tip towards the apple's surface with a certain force. In the diagram here, the pen is shown by the red tadpole symbol approaching from the right. The computer constantly receives the tip's position from the phantom and calculates if the tip is in contact with the surface (the gray horizontal line in the diagram). We assume that anything to the left of the grey line is inside the apple. If there is no intersection - nothing happens, the tip is unopposed to proceed towards the surface.
Once the tip makes contact, the computer detects this intersection and gets ready to calculate a counter force. However, at first your tip will actually overshoot a bit! The amount of counter force is dependent on how much the tip is inside the apple, the deeper inside, the stronger the force. The force's direction is calculated so that it will push the tip towards the outside, here this means simple pushing it to the right. The computer will then make the phantom to apply this force (vector), push the tip back a bit, again report the tip's new position for a new calculation.This way, the tip is pushed closer and closer to the surface until it is outside again. As the user continues to push towards the surface (to the left) this leads to a sort of "tug-of-war" between the user's force and the phantom's counter-force.
You may be wondering how this creates the sensation of a surface? The calculations and the adjustments of the counter-force are done very, very quickly - about 1000 times a second! This very quickly leads to the establishment of a "force equilibrium" around the location of the surface and our hand does simply not notice the constant fore-and-back of the forces because it all happens so fast. Something similar happens when more than ~20 images are displayed to you within a second - you perceive a movie instead a series of images.
You may be wondering how this creates the sensation of a surface? The calculations and the adjustments of the counter-force are done very, very quickly - about 1000 times a second! This very quickly leads to the establishment of a "force equilibrium" around the location of the surface and our hand does simply not notice the constant fore-and-back of the forces because it all happens so fast. Something similar happens when more than ~20 images are displayed to you within a second - you perceive a movie instead a series of images.